









Vertical Loads
In applications where there is a constant torque being applied to the motor shaft (ie: gravity pulling a vertical load) special considerations need to be made to make sure the load doesn’t move excessively before the brake is applied.
Disable modes
It is generally recommended to use AXIS#.DISMODE 2 or 3 to have the drive stop the motor and hold it in position until the brake has been applied. This provides the most control over the shaft while disabling and ensures the motor is stopped before applying the brake.
The chart below shows the drive behavior for DISMODE 2 and 3 with AXIS#.CS.DEC of 10,000 rpm/s, AXIS#.ZEROV = 100 rpm, and AXIS#.MOTOR.TBRAKEAPP = 15 ms.
AXIS#.DISMODE = 2 or 3 (controlled stop)
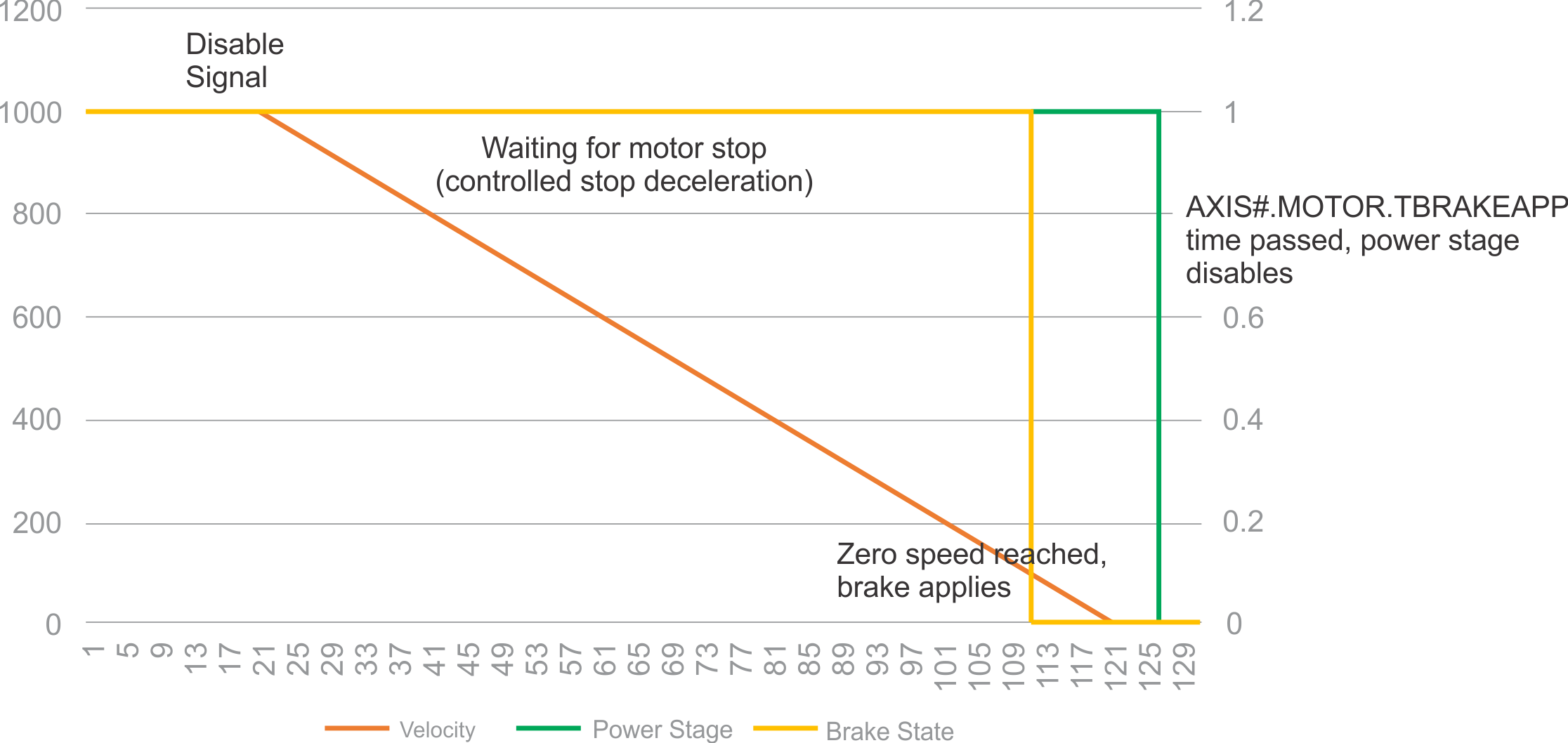
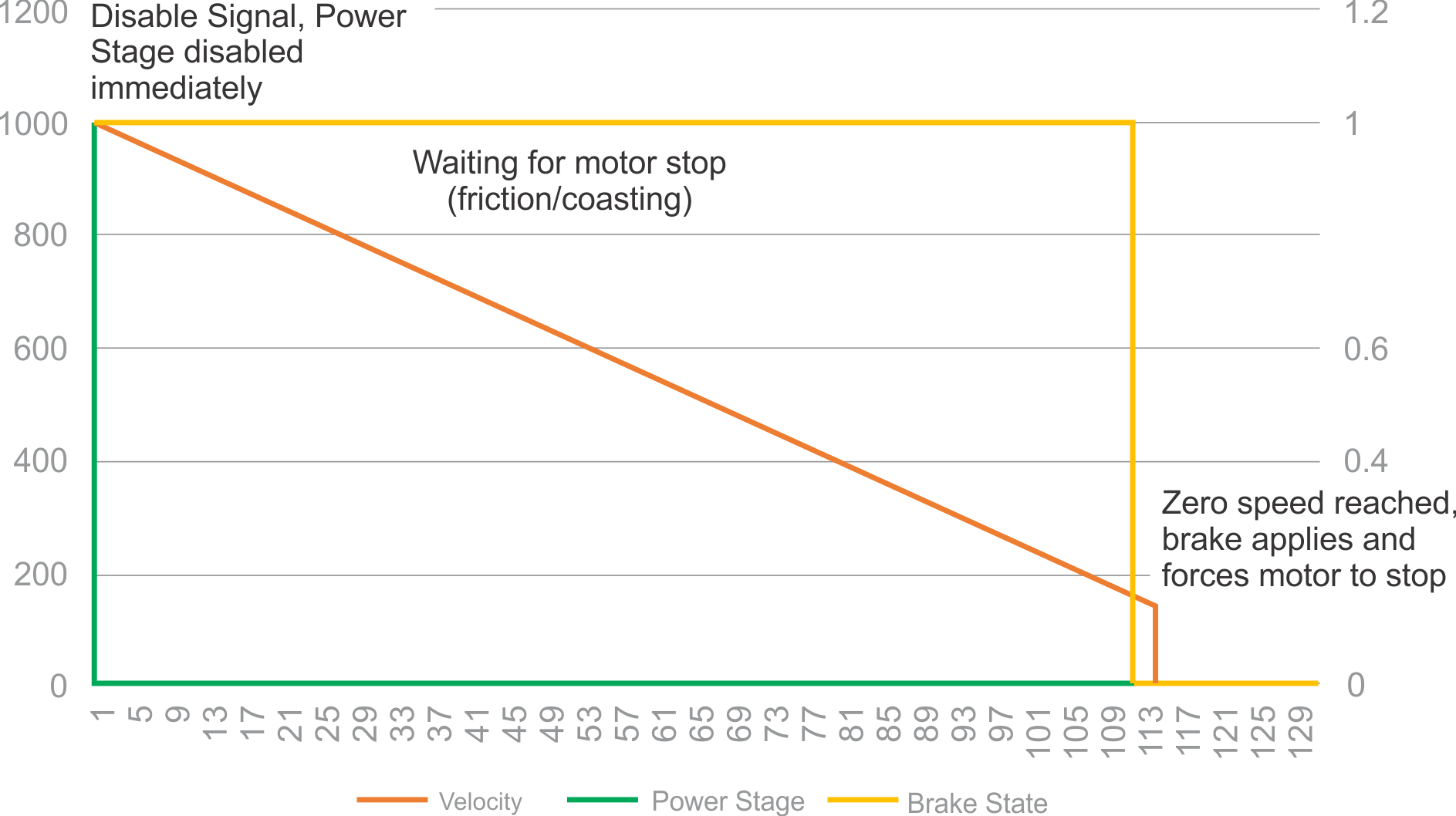
Disable mode 0 (disable immediately) disables the power stage and uses friction to coast to a stop. If a constant torque is being applied, the axis may not reach the AXIS#.ZEROV threshold required to apply the brake and the load will drop until it hits something. This can be alleviated somewhat by using AXIS#.MOTOR.BRAKEIMM or AXIS#.MOTOR.TBRAKETO, but the load will still move before the brake is able to be applied and the brake will be applied to a moving motor shaft consistently, which is undesirable and leads to premature hardware failure.
AXIS#.DISMODE = 0 (disable power stage immediately)
Disable mode 1 (dynamic brake) will use dynamic brake to stop the motor. While better than mode 0, this mode may still result in some shaft movement before the brake can be applied due to the nature of dynamic brake. There will be a minimum speed that the shaft will rotate while dynamic braking. Similar to mode 0, if AXIS#.ZEROV is below the speed at which the load drops, the brake will not apply unless AXIS#.MOTOR.BRAKEIMM or AXIS#.MOTOR.TBRAKETO are configured.
AXIS#.MOTOR.BRAKEIMM Configuration
The AXIS#.MOTOR.BRAKEIMM parameter should be set to 1 in vertical load applications. It specifies whether the drive should apply the brake when the power stage disables regardless of whether the axis has reached AXIS#.ZEROV threshold. AXIS#.MOTOR.BRAKEIMM has no effect while disabling with a controlled stop under normal conditions. The drive follows the AXIS#.CS.DEC rate until it reaches AXIS#.ZEROV threshold and applies the brake regardless of the AXIS#.MOTOR.BRAKEIMM setting. If a fault occurs such that a controlled stop cannot be followed, the drive disables the power stage immediately causing the axis to use friction to come to a stop. In vertical load applications with a constant torque on the motor, letting the axis coast is dangerous. The BRAKEIMM parameter will make sure the brake applies when the drive detects the fault condition regardless of the velocity.
-
- While the brake will apply as fast as possible after disabling the power stage, the load may still drop some and the brake will be used on a moving shaft.
AXIS#.MOTOR.TBRAKETO Configuration
AXIS#.MOTOR.TBRAKETO applies the brake after a certain time has passed without reaching AXIS.ZEROV threshold. This is useful to make sure that the brake applies in the event the load moves faster than the defined threshold. It should be thought of as a back-up setting and it should not hit this timeout under normal circumstances. As previously mentioned, stopping the shaft with the brake while in motion leads to premature hardware failure.





